There is much ongoing research into so-called robot-assisted rehabilitation, to help people train leg muscles and restore their ability to walk after a stroke or spinal cord injury. A robot acts as an outer skeleton of the lower part of the body to provide support during rehabilitation.
Now a Chinese research team has developed a robot that could mean a big step forward in this kind of rehabilitation since it enables a natural knee motion.
The motion of the knee is a particular challenge because it is one of the most complex mechanical systems in the human body. And a critical part of the rehabilitation is our ability to master our legs.
The knee joint’s motion is actuated by several skeletal muscles along its articular surfaces, and its center of rotation moves.
Since movement transparency is critical when wearing a robot for gait rehab: When the patient is wearing the exoskeleton, the movement must be synchronized and consistent with a patient’s natural movement. “If not, it exerts extra forces on the human joint,” Chen said. “And this extra force causes patient discomfort and unnatural movements.”
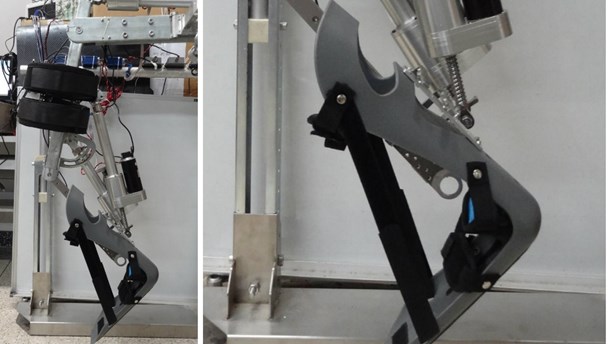
The Chinese scientists have solved the problem with a parallel knee which mimics human autonomy, enabling natural movement, but also providing much-needed stability.
“Our new design features a parallel knee joint to improve the bio-imitability and adaptability of the exoskeleton,” explained Weihai Chen, a professor at Beihang University’s School of Automation Science and Electrical Engineering, in Beijing, China.
The researchers are now working on to get the movements of this external robotic skeleton to be controlled by the patient’s own brain signals. Which would make this skeleton work as part of the human body, according to Weihai Chen.
Reference:
Mingxing Lyu et al. Design of a biologically inspired lower limb exoskeleton for human gait rehabilitation Review of Scientific Instruments. October 2016. DOI: 10.1063 / 1.4964136







![OpenAI. (2025). ChatGPT [Large language model]. https://chatgpt.com](https://www.illustratedcuriosity.com/files/media/55136/b1b0b614-5b72-486c-901d-ff244549d67a-350x260.webp)
![OpenAI. (2025). ChatGPT [Large language model]. https://chatgpt.com](https://www.illustratedcuriosity.com/files/media/55124/79bc18fa-f616-4951-856f-cc724ad5d497-350x260.webp)
![OpenAI. (2025). ChatGPT [Large language model]. https://chatgpt.com](https://www.illustratedcuriosity.com/files/media/55099/2638a982-b4de-4913-8a1c-1479df352bf3-350x260.webp)








